自動運転技術で大注目されるLiDARアノテーションとは?

目次
はじめに
近年、自動運転技術は急速に発展しています。
筆者の私が最近新車を買った友人の助手席に座らせてもらうと、高速道路ではハンドルから手を離して話しかけてきました。それを見てつい、「しっかり運転してよ!」と言ってしまいましたが、そんな会話をしている間も車は乱れることなくカーブを曲がり、走行車線を走り続けていました。近未来にタイムスリップしたかのような感覚に包まれます。
アメリカでは完全無人タクシーのサービスが限定的に開始され、サービスエリアを拡大し続けています。
このように身近になってきた自動運転技術の発展において、周囲環境の正確な認識は最も重要な要素の一つです。その中核を担うのが「LiDAR(Light Detection and Ranging)」技術と、そのデータを解析するための「LiDARアノテーション」です。
本記事では、自動運転の技術の現在の状況、LiDAR技術の基礎から実際のアノテーション作業、さらには自動運転における活用事例まで、実践的な視点で解説します。
自動運転技術の現在
世界では、ADAS(先進運転支援システム)/自動運転システムの搭載台数が2021年には4097万6019台で、2020年度比では17.5%上昇しており、2030年には約8000万台の搭載台数に上るのではないかと予測されています。(矢野経済研究所調べhttps://www.yano.co.jp/press-release/show/press_id/3043)
技術競争が日米欧中を中心に発展しており、アメリカの西海岸(サンフランシスコ、ロサンゼルス、フェニックス、オースティン(現在は招待制での運行)、アトランタ(実験進行中))では、すでにWaymo社によりレベル5(完全自動運転車)のサービスが実用化され、追随する形で日本の自動車企業が出資している中国ユニコーン企業のWeRide社、Pony.ai社、中国配車アプリ大手DiDi社もロボットタクシー・バス、配送用バン、自家用車向け自動運転技術の開発、IPOや資金調達を進め、アジアや欧米を中心に拡大しています。
このように、自動運転技術はこれからも世界各地で大きな変化を生み出すことが予想できます。その自動運転技術の肝とも言えるのが、今回紹介するLiDAR(ライダー)技術とLiDARアノテーションです。
LiDAR(ライダー)とは
LiDAR(ライダー)は、光の反射を利用したレーザー光を使用して対象物までの距離を正確に測定するセンシング技術です。Light detection And Ranging(光による検知と距離測定)の略称です。
レーザーパルスを発射し、その反射光が戻ってくるまでの時間(Time of Flight)を計測することで、ミリメートル単位での距離測定が可能です。この技術により、車両の周囲360度の環境を3次元的に把握することができます。
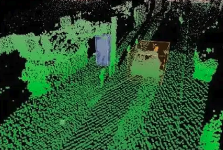
◼︎LiDARアノテーション例
レーダー(ミリ波レーダー)とLiDARの違い
似た言葉にレーダー(ミリ波レーダー)がありますが、こちらは「電波」を対象物に当てて距離を測ります。レーダーは雨や霧などを透過できるため悪天候下で強いという長所があります。
しかし、LiDARで使用される光の方が、より波形が短く光束密度が高いために対象物が小さくてもその形状を正確に捉えることができるという利点があります。しかし、LiDARは「光」を使用することから、雨などの悪天候の場合は検出精度が下がってしまうというデメリットがあり、その点ではレーダーに分があります。
ToFセンサーとLiDARの違い
さらに、LiDARと同じようにToFセンサーという言葉が使われることもあります。先ほども上がったTime of Flightのことですね。ToFセンサーとは距離情報を測定するためのセンサーのことを指し、LiDARはそのToFセンサーを内蔵して、複数のToFセンサーを用いることで広範囲をスキャンしてその結果を組み合わせて3D点群を作る技術のことを指しています。つまり、この2つの言葉は包含関係にあり、LiDARにはToFセンサーが使われている、ということになります。
LiDAR技術のこれまでと現在
自動運転技術で注目されるようになったLiDARは最新技術のように思われていますが、技術としては、1960年代には宇宙開発や軍事利用する目的で使われていました。月面の地形測定や、軍事上の地形把握で活用されていました。
ガジェットが好きな人であれば、2020年以降にApple製品に搭載され始めたことでLiDARを知った方も多いかもしれません。
iPhone12〜14の Pro・Pro MaxシリーズとiPad Pro(第2世代以降)にLiDARセンサーが搭載され、より精度が求められるARアプリケーションや3Dスキャニングが手軽に行えるようになったことで自動車業界、自動運転のみならず、建築業界や農業、エンターテイメントの業界でも注目されるようになりました。
ちなみに、このシリーズ以外の通常のモデルでも簡単に空間の計測をすることができますが、こちらはカメラによる計測をしています。引越しの時や新しい家具を購入する際に、部屋の中で使うととても便利です。
ここまでレーダー(ミリ波レーダー)やカメラ、LiDARセンサなど、一見似たような用途のものが上がったので特徴をまとめておきます。

カメラ、ミリ波レーダー、LiDARの比較表
LiDARアノテーションとは
自動運転システムにおける頭脳を形成するプロセス
さて、ここまでLiDARという技術について述べてきました。自動運転システムで実際に使用するためには、データをLiDARで取得するだけではなく、そのデータにラベル付けして意味付けをすることで、機械学習させる必要があります。
LiDARアノテーションは、LiDARが取得した点群データに意味づけ(アノテーション)を行う作業です。ここでは、例として、自動運転システムで使われるアノテーションのラベル名の一例を列挙します。
具体的には、以下のような情報を点群データに付与していきます。

オブジェクトの種類の識別
車両:乗用車、トラック、バス、バイクなどの区別
歩行者:大人、子供、群衆などの分類
自転車・バイク:自転車に乗った人、停止中の自転車の区別
その他の移動物体:動物、電動キックボードなど
静的物体:道路標識、信号機、建物、植生など
3次元位置情報の記録
X座標:車両の前後方向の位置
Y座標:車両の左右方向の位置
Z座標:地面からの高さ
これらの座標は、センサーを原点とした相対座標系で記録
物体のサイズと向きの定義
長さ(Length):物体の前後方向の寸法
幅(Width):物体の左右方向の寸法
高さ(Height):物体の上下方向の寸法
方向(Heading):物体の向いている方向(度数法で表現)
傾き(Pitch, Roll):必要に応じて記録
移動物体の追跡情報
任意のID:フレーム間で同一物体を識別するための識別子
速度ベクトル:移動方向と速さの情報
加速度:速度の変化率
予測軌道:過去の移動履歴から算出する将来の予測位置
この作業により作成された教師データは、機械学習モデルの学習に使用されます。LiDARデータは大量の点群データを生成するため、アノテーションが正確でないと有効なデータとして学習させることができません。
高品質なアノテーションデータは、自動運転システムの認識精度に直接的な影響を与えるため、細心の注意を払って作業を行う必要があります。
また、アノテーション作業は多大な時間と技術と経験が求められ、社内での作業はコストが嵩んでしまうケースが多いため、最近ではアノテーション企業に委託する会社が増加しています。
自動運転に使われているLiDARアノテーションの重要性
LiDARアノテーションがなぜ重要なのでしょうか。それは車の技術に関しては、人命が大きく関わってくるためです。
自動運転に関わる事故は実際には頻繁に起こってしまっているのが現状です。
日本国内では2023年11月日本初の自動運転レベル4(高度運転自動化・走行領域は限定的)で運行がスタートした福井県永平寺町での自動運転モビリティが停まっている自転者と接触する事故を起こしました。乗客4人には怪我がなかったものの、安全対策がなされるまで停止しなかったという状況が明らかにされました。
原因としては、自動ブレーキを適切に作動させるための学習データが不足していたことによると発表されました。
この事故を起こした車両は、ミリ波レーダーと超音波センサー、カメラを搭載させており、ミリ波レーダーと超音波センサーで物体検知はしていた。前方カメラによる画像認識と合わせた自動ブレーキ制御判断を行う仕様となっていたが、無人の自転車を認識する学習データが不足していたことと、真後ろからの自転車を形状的に「自転車」と認識できていなかったことで事故が発生しました。
この事故が示唆しているのは、センサーによる物体検知の方法とAIの頭脳に直結するデータの不足が事故を引き起こしてしまうということです。様々なセンサーが搭載されることが一般的ではありますが、事故をなくすためにはデータの精度を高めるのが最も重要であることが明白です。
(参考:「日本初レベル4の自動運転事故、「追加学習」で来年3月再開へ」自動運転LAB HPよりhttps://jidounten-lab.com/u_44088)
LiDARアノテーションのユースケース
ここまでLiDARアノテーションについてみてきましたが、一言でまとめると、 3D空間認識の要となる技術といえます。
自動運転やロボティクスの発展に伴い、注目を集めているLiDARアノテーションですが、この技術は、レーザースキャナーで取得した3D点群データに、人間が意味づけを行う作業です。では、自動運転以外に実際にどのような場面で活用されているのでしょうか。
自動運転技術
最も代表的な活用シーンは、自動運転車の開発です。LiDARで取得した周辺環境の3D点群データに対し、車両、歩行者、自転車、建物、道路標識などを正確にラベリングすることで、AI学習用のデータセットを作成します。これにより、自動運転システムは周囲の物体を正確に認識し、適切な判断を下せるようになります。
建設・土木分野
建設・土木分野でも、LiDARアノテーションは重要な役割を果たしています。建設現場の3D点群データに対して、建物の躯体、配管、電気設備などの要素を詳細にアノテーションすることで、建設進捗の管理や、設計図との整合性チェックが可能になります。また、地形測量データへのアノテーションは、災害リスク評価や都市計画に活用されています。
製造業
製造業では、工場内の設備や製品の3Dスキャンデータにアノテーションを付与することで、品質検査の自動化や設備の予知保全に役立てています。例えば、製造ラインの設備の各部品をラベリングし、経時的な変化を監視することで、故障の予兆を捉えることができます。
セキュリティサービス
セキュリティ分野では、監視システムにLiDARとアノテーションを組み合わせることで、不審者の検知や立入禁止区域への侵入検知などを、より正確に行えるようになっています。従来の2Dカメラでは難しかった夜間や悪天候時の監視も、より確実に実施できます。
小売業
小売業における店舗内の人流分析や、スポーツ選手の動作解析など、応用分野は着実に広がっています。特に最近では、メタバースやデジタルツインなど、現実世界を3D空間でデジタル化する需要が高まっており、LiDARアノテーションの重要性は一層増しています。
精度を向上させるには?
前章で取り上げたように、LiDARアノテーションは、私たちの暮らしや産業のデジタル化を支える基盤技術として、今後さらなる発展が期待されています。これはLiDARの性能や信頼性向上が背景にあります。また、スマートフォンに搭載できるほどの小型化、低コスト化が進んだということも一つの要因と考えられます。
ただし、LiDAR自体の精度だけではなく、製品として安全に使われるためには、精度の高いアノテーション作業が必要となります。アノテーションの自動化が叫ばれて久しいですが、現状は熟練した人間の手によるアノテーションから置き換えるのは技術的に難しいとされています。
自動運転のさらなる発展にはLiDAR技術とその裏側にあるアノテーション作業の両輪が噛み合って回っていくことが重要です。
具体的にLiDARアノテーションの精度向上には、技術的な側面と人や組織の側面の2つに分けて考えられます。
技術的な側面
❶元データの多様性と精度
前提として、学習データとして望ましいのは、様々な環境条件で集められたデータです。天候や季節、場所によって得られるデータの多様性を持たせることで、判別できるシチュエーションが増えることにつながります。どれだけアノテーションに熟練している場合でも、元のデータの精度が悪い場合はアノテーション結果に大きな影響が出てしまうことがあります。上記で説明したようにLiDARの技術の発展が欠かせません。
❷アノテーション前処理
アノテーション作業においては、ノイズ除去作業が最も重要といえます。
LiDARで取得したデータからノイズや不要な点を除去し、フィルタリングやサンプリングを事前に行うことで質を担保することができます。(ノイズ除去に関してはこちらhttps://harbest.io/documents/525/)
さらに、LiDARデータは点群密度が低い場合は、対象物の形状や位置関係が見づらくなり、アノテーション精度が低くなりやすく、結果、全体の品質が下がることにつながります。また、点群密度が全体で不均一の場合は、計算量が多くなるのに加え、特徴量抽出が難しくなるため、アルゴリズムにおいて処理速度、品質面で悪影響を及ぼすため、標準化されることで性能の向上が期待できます。
人的な側面
❶事前の認識合わせ・緻密なルール作成・要件定義
アノテーション作業をする前には、そのプロジェクトに関わる人々との間で認識を合わせておくことが重要です。アノテーション作業を実施後に大きな問題が発生したり、プロジェクトが遅延したりする主因は、事前のコミュニケーション不足によるものです。膨大なアノテーション後に追加条件が発生してしまわないように事前に緻密で明確なルールを作成することが望ましいでしょう。社外にアノテーションを依頼する場合は用件定義は特に重要なポイントです。
❷作業者がルールを同じように正しく認識する
同じルールでも作業者によって認識が大きく違ってしまうと、アノテーションデータに大きな差ができてしまい、機械学習させる際に誤った学習をしてしまうことになります。
熟練したアノテーターでも誤って認識してしまう可能性があるので、作業開始前に作業者による差が出ないように定期的な確認やトレーニングが必要です。また、曖昧な基準によるアノテーションの煩雑化も品質を下げる要因となるため、前項で示したように、様々な視点から曖昧な点が生まれないかを事前に確認しておくことが重要です。
❸管理体制
アノテーションを行う際には、品質管理とアノテーター管理も重要です。
品質管理は作業者一人が確認するのではなく、二重、三重にと厳密なチェックをすることで品質の高いアノテーション結果を得ることにつながります。一次作業では見過ごしてしまった点も厳重な品質管理体制でミスを補うことができます。
アノテーター管理についても、作業のフィードバックループを回すことで、アノテーターが誤った認識を修正し、品質の向上につながります。
まとめ
自動運転技術には欠かすことのできないLiDAR技術について詳しく解説してきました。
人命に関わる自動運転技術だからこそ、AIが学習する学習データは精度を高めなければなりません。
LiDARのアノテーションについて書かれた記事は日本では少ないため、この記事を読んでLiDARと自動運転やそれ以外の業界や領域について理解が深まれば幸いです。
harBest(ハーベスト)では、LiDAR アノテーションをはじめとし、AIに欠かすことのできないアノテーション、教師データの作成について、お客様のビジネス領域や要望に合わせてご依頼を承っております。また、データセットの配布、販売も行っております。高品質かつ専門的なデータセット作成にお困りの場合、ぜひご相談ください。 随時ご相談を受け付けております。下記よりお気軽にお問い合わせください。